 您好, 歡迎來到化工儀器網
您好, 歡迎來到化工儀器網

西門子6SL3131-6TE21-6AA3質保無憂
西門子6SL3131-6TE21-6AA3
Sinamics S120 是西門子公司推出的全新的集V/F、矢量控制及伺服控制于一體的驅動控制系統,它不僅能控制普通的三相異步電動機,還能控制同步電機、扭矩電機及直線電機。其強大的定位功能將實現進給軸的、相對定位。 Sinamics S120 產品包括:用于共直流母線的DC/AC 逆變器和用于單軸的AC/AC 變頻器。
• 共直流母線的DC/AC 逆變器通常又稱為Sinamics S120 多軸驅動器,其結構形式為電源模塊和電
機模塊分開,一個電源模塊將3 相交流電整流成540V 或600V 的直流電,將電機模塊(一個或多個)
都連接到該直流母線上,特別適用于多軸控制,尤其是造紙、包裝、紡織、印刷、鋼鐵等行業。優
點是各電機軸之間的能量共享,接線方便、簡單
含有 3RK3 模塊化系統 (MSS) 的 AS-Interface 結構
本地 AS-Interface 安方案使用 3RK3 模塊化安全系統 (MSS) 來進行安全型處理。在這種情況下,一個標準控制器(即,沒有 F-CPU)和一個標準 AS-Interface 主站就足夠了。
任務的分配如下:
通過 AS-Interface 線上的安全輸入從站模塊采集安全信號。
通過中央模塊的 F-DI 輸入或 MSS 的擴展模塊,檢測其它信號。
通過 MSS 的中央模塊來分析和處理信號
經由 AS-i 線、通過安全輸出模塊
通過 CP 或集成接口(點對點)進行數據通信
通過 CP 340/CP 341 通信處理器或 CPU 313C-2 PtP 或 CPU 314C-2 PtP 的集成接口,可經濟有效地建立點到點連接。有三種物理傳輸介質支持不同的通信協議:
20 mA (TTY)(僅 CP 340/CP 341)
RS 232C/V.24(僅 CP 340/CP 341)
RS422/RS485
可連接以下設備:
SIMATIC S7、SIMATIC S5 自動化系統和其他公司的系統
打印機
機械手控制裝置
掃描器,條碼閱讀器,等
特殊功能塊包括在通信功能手冊的供貨范圍之內。
通過多點接口 (MPI) 實現數據通信
MPI(多點接口)是集成在 SIMATIC S7-300-CPU 中的一個通信接口。可用來簡單地組網。
MPI 可以同時連接多個配有 STEP 7 的編程器/PC、HMI 系統(OP/OS)、S7-300 和 S7-400。
全數據:
“全數據通信"服務可以在聯網的 CPU 間周期性地進行數據交換。一個 S7-300 CPU 可與多達 4 個數據包交換數據,每個數據包含有 22 字節數據,可同時有 16 個 CPU 參與數據交換(使用 STEP 7 V4.x)。
例如,一個 CPU 可以訪問另一個 CPU 的輸入/輸出。只可通過 MPI 接口進行全數據通信。
內部通信線(C 線):
CPU 的 MPI 直接與 S7-300 的 C 線相連。這樣,通過 MPI,可直接從編程器來尋址帶有 C 線接口的 FM/CP 模塊。
功能強大的通信技術:
多達 32 個 MPI 節點。
使用 SIMATIC S7-300/-400 的 S7 基本通信的每個 CPU 有多個通信接口。
使用編程器/PC、SIMATIC HMI 系統和 SIMATIC S7-300/400 的 S7 通信的每個 CPU 有多個通信接口。
數據傳輸速率 187.5 kbit/s 或 12 Mbit/s
靈活的配置選件:
使用性能可靠的組件建立 MPI 通信:PROFIBUS 和“分布式 I/O"系列的線電纜、線連接器和 RS 485 中繼器。使用這些組件,可以根據需求實現設計的優化調整。例如,任意兩個 MPI 節點之間多可以串入 10 個中繼器以連接更大距離
操作步驟(已設定開關量輸入點 DI2 為ON/OFF1命令源 P840)
1. 進入“Homing"
2. 連接一數字量輸入點 ( DI 1 )至參數 P2596作為設置參考點信號位,該位上升沿有效
3. 設定參考點位置坐標值 P2599(如 0)
4. 閉合DI 2運行使能
5. 閉合DI 1 激活“設置參考點"命令,于是該軸當前位置 r 2521 立即被置為P2599 中設定的值。如 r2521=0
4.2主動回零(Active Homing)
主動回零方式只適用于增量編碼器,值編碼器只需在初始化階段進行一次編碼器校準,以后不必做回零
主動回零有三種方式:
僅用編碼器零標志位( Encoder Zero Mark ) 回零
僅用外部零標志( External Zero Mark ) 回零
使用接近開關 + 編碼器零標志位( Homing output cam + Zero Mark ) 回零
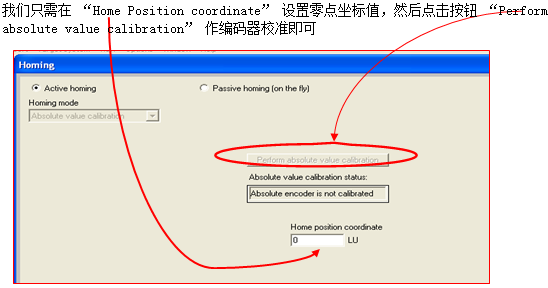
4.2.1值編碼器的主動回零
如果我們使用值編碼器并且作主動回零時會看到如下頁面:
4.2.2增量編碼器的主動回零
依下圖所示進行配置
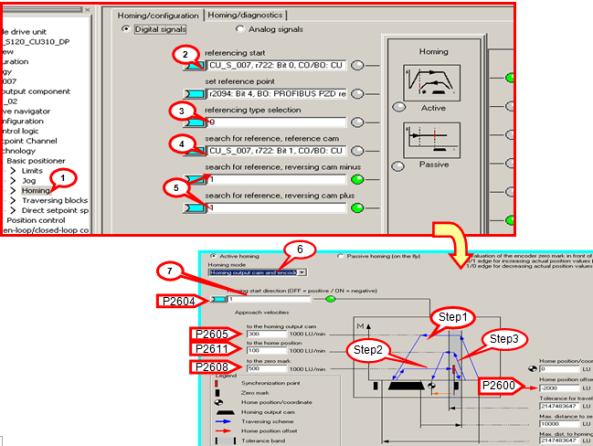
相關參數設定
1. 進入 “ Homing “ (回零) 頁面
2. 定義開關量輸入點DI 1為開始尋參命令(參數P2595=722.0)
3. 回零方式選擇主動回零P2597=0
4. 定義開關量輸入點DI 2為接近開關 P2612= 722.1(粗脈沖)
5. 軸運行極限點,如果回零過程中極限點到達(P2613/P2614=0)則軸反轉。若兩點全為零則軸停止。
6. 回零方式:接近開關 + 編碼器零脈沖
7. 回零開始方向P2604 (0:正向;1:反向)
動作過程:
變頻器運行ON/OFF1閉合,DI 1閉合,開始尋參過程
? 上圖中(Step1)軸按照P2604 定義的搜索方向,以大加速度 P2572 加速至搜索速度 P2605,到達接近開關后(DI 2 閉合),以大減速度P2573減速停止,進入下一步:搜索編碼器的零脈沖
? 軸反向加速至速度 P2608,離開接近開關后(DI 2 斷開)遇到的編碼器的*個零脈沖后軸停止。進入下一步:回參考點
? 上圖中(Step3)軸反向加速以速度 P2611運行偏置距離P2600后停止在參考點,完成主動回零過程。
4.3動態回零(Passive Homing)
Passive Homing (動態回零)又稱為 Homing on the fly
動態回零用于軸工作于任意定位狀態時動態修改當前位置值為零(如:在點動時、執行程序步時,執行 MDI 時),執行動態回零后并不影響軸當前的運行狀態,軸并不是真正的回到零點而只是其當前位置值被置為0,重新開始計算位置。
前提條件:P2597=1
值編碼器的動態回零:
